BOTONES DE PROGRAMACIÓN 
PIEZAS IDENTIFICADAS POR SUS NOMBRES




IDENTIFICAR EN EL PROYECTO LAS PARTES UTILIZADAS CON SUS RESPECTIVOS NOMBRES.

proyecto de la tortuga
https://drive.google.com/file/d/0Bx4F8owzaM3xQVlPUGFtRzA1TGM/view

III BIMESTRE
En este tercer bimestre desarrollamos el proyecto del perrito , en el examen vendrá para marcar
el orden de como se arma este proyecto, como se llaman las piezas a utilizar , que cuidados debemos tener para armar este proyecto, cuales son los botones de programación que se utilizan para darle movimiento.


El segundo proyecto fue armar el estrujador de vino.

LAS PIEZAS UTILIZADAS.

EV3 ROBOTICA
http://canaltic.com/rb/legoev3/1_el_robot_lego_ev3.html
Un robot es un sistema eléctrico y mecánico que dispone de una unidad de control donde mediante programación puede ejecutar distintos movimientos. Un robot consta de 6 partes interconectadas:
- Esqueleto o Chasis (estructura)
- Mecanismos Móviles y Motor (movimiento)
- Sensores (percepción)
- Unidad de control (procesamiento)
- Conectores (comunicación)
- Fuente de Alimentación (energía)
Estos son los mecanismo que utiliza un robot para su funcionamiento
Los componentes electrónicos de Lego EV3 son:
- Bloque EV3. Es un bloque que funciona como unidad de control. Este bloque lleva una batería recargable.
- Motores grandes. Son dos servomotores que permiten programar desplazamientos.
- Motor mediano. Se utiliza para mover partes del robot.
- Sensor ultrasónico. Utiliza ondas de sonido para medir la distancia o la presencia de obstáculos.
- Sensor de color. Reconocer siete colores diferentes.
- Girosensor. Mide el ángulo que gira el robot de acuerdo a una orientación inicial.
- Sensores táctiles. Identifica tres condiciones: tocado, en contacto y lanzado.
TIPO DE MOTORES
1.- Motor grande

Es un servomotor, es decir, un motor inteligente potente que funciona a 160-170 rpm. (revoluciones por minuto).
El motor grande se utiliza para ser la base de propulsión del robot diseñado.
2.- Motor mediano

Es un motor más pequeño y ligero que el motor grande. Funciona a 240-250 rpm. El motor mediano se suele aplicar a los movimientos de partes del robot en lugar de su desplazamiento.
3.- SENSORES.

4. EL BLOQUE
EV3 es la unidad de control y alimentación eléctrica de motores y sensores del robot.
- Pantalla. Muestra información de lo que sucede en el interior del bloque.
- Botones. Permiten explorar el bloque EV3, ejecutar el programa guardo en el bloque
5.- ESTADO DEL BLOQUE
El estado del bloque en cada momento se representa por el color y parpadeo de la luz que rodea a los botones:
| Color | Estado |
| Rojo | Iniciando, apagando y actualizando |
| Rojo parpadeo | Ocupado |
| Naranja | Alerta |
| Verde | Listo |
| Verde parpadeo | Ejecutando programa |

6.- CONEXIONES AL BLOQUE
El bloque EV3 es el cerebro del robot ya que ejecuta los programas y controla el resto de componentes electrónicos. Estos elementos se conectan al bloque en los puertos situados en su parte delantera y trasera utilizando los cables conectores negros planos.
El brick EV3 dispone de 4 puertos de entrada numerados del 1 al 4 donde se conectan los sensores.

Si el bloque está conectado al ordenador, el software EV3 detecta automáticamente qué tipo de sensor está conectado a cada puerto. Sin embargo si el bloque no está conectado, el software EV3 asignará por defecto cada tipo de sensor a un puerto concreto:
- Puerto 1: Sensor táctil.
- Puerto 2: Girosensor/Sensor de temperatura.
- Puerto 3: Sensor de color
- Puerto 4: Sensor ultrasónico/Sensor infrarrojo.
En el extremo opuesto del bloque EV3 se ofrecen los 4 puertos de salida etiquetados como A, B, C y D donde se conectan los motores.

Si el bloque está conectado al ordenador, el software EV3 detecta automáticamente qué tipo de motor está conectado a cada puerto. Sin embargo si el bloque no está conectado, el software EV3 asignará por defecto cada tipo de motor a un puerto concreto:
_________________________________________________________ 5 b
7.- ENCENDER Y APAGAR EL BLOQUE


_________________________________________________________ 5 b
7.- ENCENDER Y APAGAR EL BLOQUE
Para encender el bloque EV3:
- Presionar el botón del centro.
- La luz de estado del bloque EV3 se encenderá en color rojo mostrándose la pantalla de inicio: Mindstorms Starting ...
- Al cabo de unos instantes la luz de estado cambiará a verde y el bloque EV3 estará listo.
Para apagar el bloque EV3:
- Presionar el botón Atrás hasta que se muestre la pantalla de de apagado. Es el botón situado en la esquina inferior izquierda de la pantalla separado del resto de botones.
- Observa que la opción Cancelar X está seleccionada por defecto.
- Pulsa sobre el botón Derecha para seleccionar la marca de verificación de Aceptar
- A continuación presiona el botón Centro para aceptar y apagar el dispositivo.
Para reiniciar el bloque EV3:
En ocasiones el bloque EV3 puede dejar de funcionar y bloquearse. Para reiniciarlo ...
- Mantener presionados a la vez durante unos instantes los botones Atrás-Centro-Izquierda
- Liberar el botón Atrás cuando la pantalla se quede en blanco.
- Soltar los otros botones cuando se muestre el mensaje "Starting ..."
- Puerto A: Motor mediano.
- Puertos B y C: Dos motores grandes.
- Puerto D: Motor grande.
IV BIMESTRE
Seguimos trabajando con ev3
sesión 1
recordamos el uso del bloque (dispositivo de ev3 donde se conecta los sensores o motores)
recordamos los sensores y motores
armamos un prototipo
El primer prototipo armado se realizo de acuerdo al manual de ev3
sesión 2
Armamos el mismo robot de la sesión anterior pero con menos piezas , permitiendo tener mas tiempo para realizar programación.
imagenes:
 Esta imagen recopila la gran mayoría de materiales a utilizar
Esta imagen recopila la gran mayoría de materiales a utilizar utilizamos los motores y conectamos las dos piezas en forma de L y lo unimos con conectores azules grandes,
utilizamos los motores y conectamos las dos piezas en forma de L y lo unimos con conectores azules grandes, otro angulo de la vista
otro angulo de la vista  colocamos la H para unir por la parte posterior en robot
colocamos la H para unir por la parte posterior en robot una vez colocado lo aseguramos
una vez colocado lo aseguramos asegurando la H con conectores Rojos
asegurando la H con conectores Rojos armamos el cuadrado la estructura que soportara al bloque
armamos el cuadrado la estructura que soportara al bloque  unimos las utilizando los conectores pequeños en que por un lado tiene la forma de una cruz.
unimos las utilizando los conectores pequeños en que por un lado tiene la forma de una cruz. una vez armado lo colocamos al robot
una vez armado lo colocamos al robot otra vista
otra vista  armamos la estructura para la bolita de acero
armamos la estructura para la bolita de acero 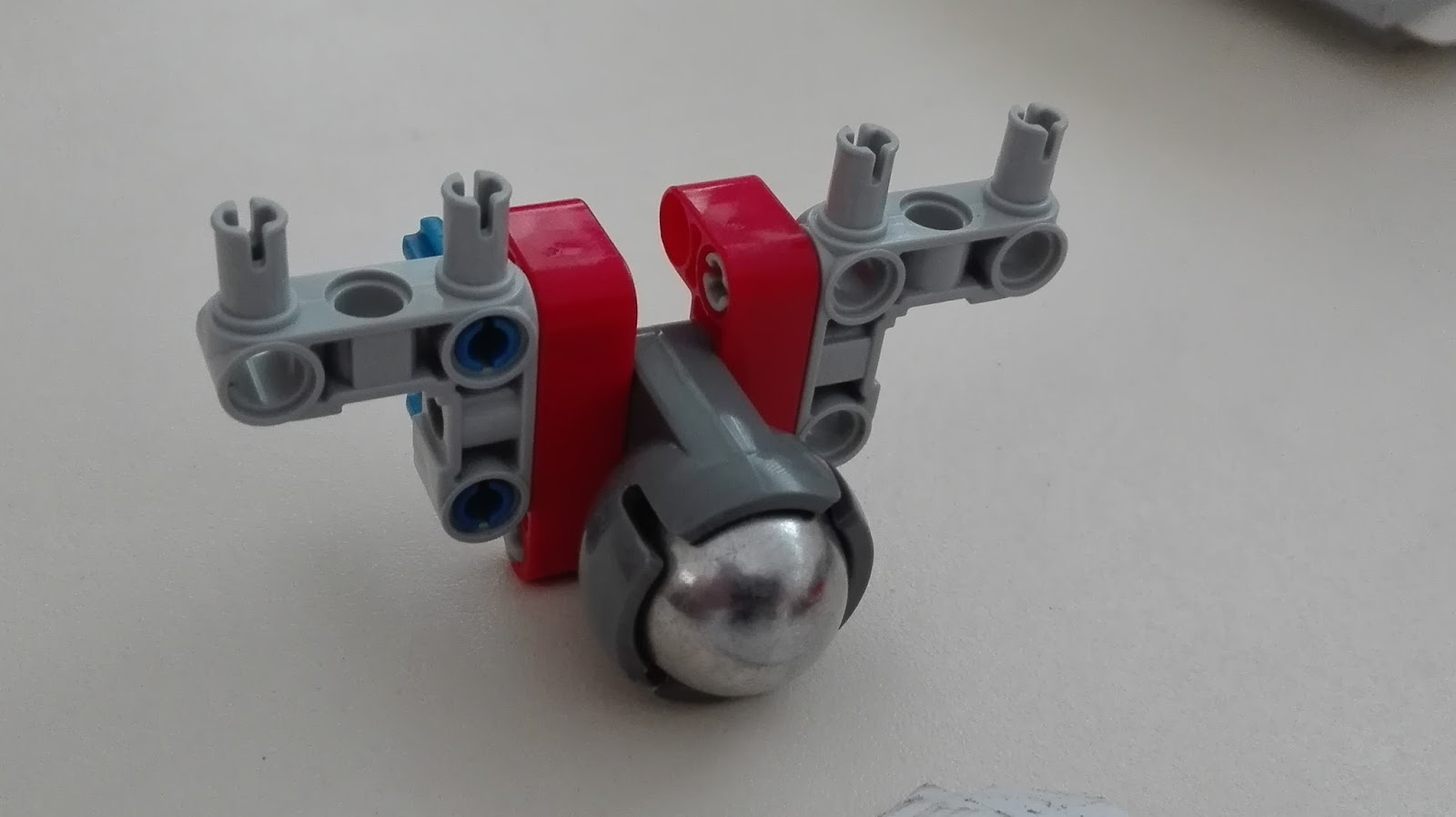 conectamos la bolita de acero
conectamos la bolita de acero otra vista
otra vista colocamos la estructura armada de la bolita de acero al robot
colocamos la estructura armada de la bolita de acero al robot  otra vista
otra vista colocamos los ejes a los motores y la llantas.
colocamos los ejes a los motores y la llantas. proyecto casi terminado
proyecto casi terminado  conexión física del cable se coloca al bloque en las letra By C y cada uno a los motores.
conexión física del cable se coloca al bloque en las letra By C y cada uno a los motores. vista de conexión a los motores
vista de conexión a los motores  robot terminado ahora a programar
robot terminado ahora a programar
programación
iconos
orden de programación
desarrollo de programación para el movimiento del robot

B+ C = indica que en esos puertos se debe colocar los cables de los motores
Se debe inserta el icono del tiempo para saber cuantos segundos el robot se
moverá en su eje
sesión 3
Utilizamos los conceptos de programación para que el robot haga un recorrido en una simulación de pista.
Es importante recordar que en toda programación va el motor luego el tiempo.
los pasos para ingresar en el bloque se observa en la imagen a mostrar
1.- Después de prender el bloque nos vamos a la tercera pestaña
2.- luego nos desplazamos a la opción BRICK PROGRAM
3.- luego aparecerá una pantalla con dos rectángulo y nos ubicamos en medio para iniciar la programación
4.-presionamos el botón hacia arriba, aparecerá un menú donde seleccionamos el motor , luego
a que dirección va, luego presionamos botón a al derecha , luego botón hacia arriba y seleccionamos el botón de tiempo para indicarle en que tiempo se moverá.

TIPS
recordemos que para que el robot gire en un angulo de 90° después de indicarle
que gire, el tiempo debe de ser de 0.25 y 0.50.
Se puede unir varios tiempo para dar la distancia que necesitamos cubrir sin agregar un motor mas
Se debe programar poco a poco , probando en el campo lo que se necesita porque si acumulamos
bloque es aveces complicado determinar donde esta el error.
* Solo los alumnos del día del logro estarán programando
* La programación se tomará en el examen bimestral.