CONOCIENDO LAS PIEZAS DE LEGO







TIPOS DE SENSORES
SENSOR DE INFRARROJOS:
Descripción: Es un pequeño dispositivo que puede alojar en su interior un diodo emisor
de infrarrojos que trabaja a una longitud de onda determinada y un receptor, que puede
ser un fototransistor (detección de línea o proximidad) que se dispone en paralelo al
emisor apuntando ambos en la misma dirección, puede ser un sensor lineal (medidor de
distancias), dependiendo del modelo su salida puede ser analógica, digital o booleana
El uso de luz IR modulada tiene por objeto hacer al sensor relativamente inmune a las
interferencias causadas por la luz normal de una bombilla o la luz del sol.
♦ SENSOR DE TEMPERATURA:
Descripción y funcionamiento: Es un circuito integrado que da una tensión
proporcional a la temperatura ambiente. Dependiendo del modelo su rango de
temperaturas varía y puede que trabaje con grados kelvin o grados centígrados.
Usos: Se usan para detección de la temperatura ambiente que tiene a su alrededor,
pudiendo activar módulos refrigeradores.
SENSOR DE ULTRASONIDOS:
Descripción: Los ultrasonidos son vibraciones del aire de la misma naturaleza que el
sonido audible pero de una frecuencia mas elevada que parte de 20 000 Hz hasta 5.108
Hz. no audibles estos por el oído humano. Se alcanzan longitudes de onda que se
aproximan a la luz visible.
Ejemplo: SRF235 SENSOR ULTRASONIDOS ALTA FRECUENCIA
SENSOR DE MOVIMIENTO
Los sensores de movimiento son aparatos basados en la tecnología de los rayos infrarrojos o las ondas ultrasónicas para poder “mapear” o captar en tiempo real los movimientos que se generan en un espacio determinado. Estos sensores de movimiento, adscritos sobre todo a cámaras de seguridad, puertas en almacenes y centros comerciales , etc; son uno de los dispositivos más reconocidos e importantes dentro de la seguridad electrónica, que tanto ha apostado por, sobre todo, dos aspectos fundamentales: el tamaño y la funcionalidad de cada uno de los equipos que usan durante el proceso. Y es que los sensores de movimiento que podemos ver, por ejemplo, encima de las entradas y salidas de establecimientos públicos que se activan con sólo la movilidad específica de los sujetos, cumplen a cabalidad con estas leyes, si se puede decir así, de la seguridad virtual que cada día, y como lo denotan varios artículos en este blog, nos sorprende cada día más.
PROYECTO 1


https://www.youtube.com/watch?v=3NU4o7V1K7c
https://docs.google.com/file/d/0Bx4F8owzaM3xTXBkTzV0SnZ1WWM/edit
III BIMESTRE
http://canaltic.com/rb/legoev3/1_el_robot_lego_ev3.html
TEMARIO DE EXAMEN BIMESTRAL
sesión 1
Los alumnos trabajan armando un robot con ev3 utilizando el método mas sencillo
se recurre al manual y se depura lo que no necesitamos.
realizamos una programación básica insertando movimiento al robot.



sesión 2
ls alumnos manipulan el sensor ultrasonico
los alumnos arman un robot igual a la clase anterior
utilizan programación insertando el sensor ultrasonico.

 En esta practica se pidió hacer una modificación en la programación en lugar de 30 se coloque 5 o menos , el efecto es que el robot frenara mas cerca al obstáculo.
En esta practica se pidió hacer una modificación en la programación en lugar de 30 se coloque 5 o menos , el efecto es que el robot frenara mas cerca al obstáculo.
sesión 3
los alumnos manipula el sensor de luz
los alumnos arman un robot y agregan la programación del sensor de luz


III BIMESTRE
http://canaltic.com/rb/legoev3/1_el_robot_lego_ev3.html
TEMARIO DE EXAMEN BIMESTRAL
En este examen se tomará la conexión de los sensores
1.- sensores
tipos de sensores
2.- motores
tipos de motores
3.-Como prender y apagar el bloque
Cuales son los pasos para colocar una batería y cual es el color que toma los led de la batería cuando se conecta al cargador.
4..-Cuales son los colores que muestra el bloque ( tabla )
1.- sensores
tipos de sensores
2.- motores
tipos de motores
3.-Como prender y apagar el bloque
Cuales son los pasos para colocar una batería y cual es el color que toma los led de la batería cuando se conecta al cargador.
4..-Cuales son los colores que muestra el bloque ( tabla )
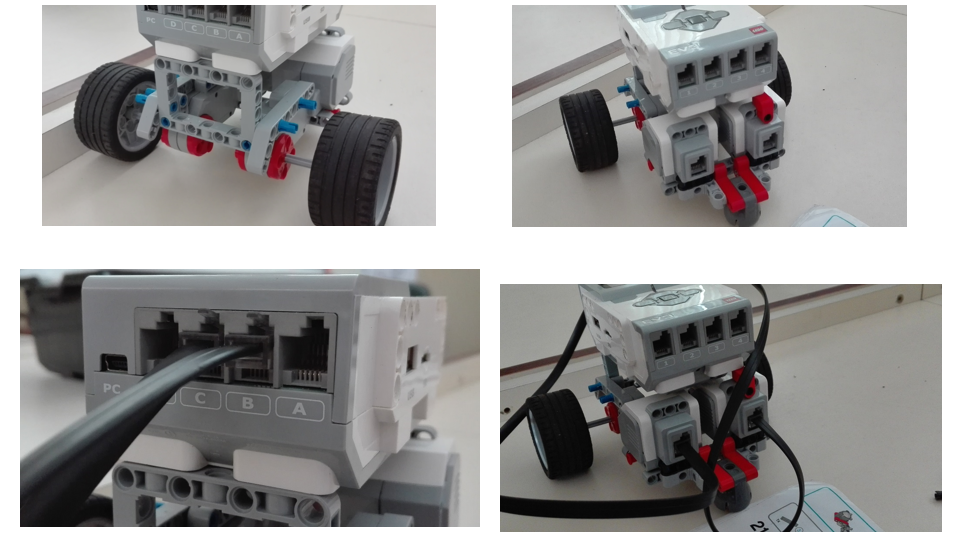
5.- Donde se coloca los motores y los sensores en el bloque. (conexión del bloque)
6.- Cual es la característica de la pantalla de bloque.( partes del bloque)
7.-Cuales son los botones a utilizar en el bloque para programar
8.-Armar una pequeña estructura de programación con el bloque y que se ejecute el programa
9.- Cual es la estructura de programación en el bloque (esta en el cuaderno)
Es importante recordar que toda esta información esta en la pagina web que se indica
http://canaltic.com/rb/legoev3/1_el_robot_lego_ev3.html
IV BIMESTREsesión 1
Los alumnos trabajan armando un robot con ev3 utilizando el método mas sencillo
se recurre al manual y se depura lo que no necesitamos.
realizamos una programación básica insertando movimiento al robot.


iconos de programación
sesión 2
ls alumnos manipulan el sensor ultrasonico
los alumnos arman un robot igual a la clase anterior
utilizan programación insertando el sensor ultrasonico.


sesión 3
los alumnos manipula el sensor de luz
los alumnos arman un robot y agregan la programación del sensor de luz


No hay comentarios:
Publicar un comentario